
Embree v3 入門
著者:久保 尋之
(公開:2019/12/184)
EmbreeはIntelが提供するCPUベースのハイパフォーマンスレイトレーサです.シーン中に膨大な数の三角形があるとき,あるレイがどの三角形とどこで交差するのか計算(交差判定と呼びます)するためには,非常に大きな計算コストが掛かってしまいます.これを効率的に計算する手法はいろいろ開発されているのですが,自分で実装するのは大変です.Embreeは交差判定を良い感じにやってくれる,非常に有り難いライブラリです.また,環境が整っていれば内部でSSE,AVXなどの命令も使って高速化してくれているそうです.とっても便利なライブラリですが,日本語のドキュメントがあまり多くないようだったので,簡単な解説をしたいと思っています.なお,Embreeはレンダリングそのもの,つまり各画素の輝度を決める仕組みは入っていないので,パストレーシングなりフォトンマッピングなり,輝度計算の手法を自分で実装する必要があります.
Embreeのインストール
本稿では64bit版Windows10とVisual Studio2017を使ってプログラムを作ってみます.なお,執筆時のv3.6.1ではOSはWindows (32bit, 64bit),Linux (64bit),Mac OS (64bit)に,コンパイラはIntel Compiler, GCC, Clang,Microsoft Compiler (vcc)対応しているそうです.Intel Compilerを使うと10%程度のパフォーマンス改善が見られるそうですが,残念ながら手元にないので諦めてVisual Studioを使います.
作業用フォルダを準備
今回,Embreeを使ってみるにあたり,ダウンロードしてきたライブラリや自分で作成するソースコードなどを保存するフォルダを作ります.どこに作っても構いませんが,差し当たってCドライブ直下に"embree"というフォルダを作成し,そこに保存していくものとします.
プリコンパイル済みライブラリをダウンロード
まずはEmbreeのDownloadページからコンパイル済みのライブラリをダウンロードします.インストーラ(.exe)とZip圧縮版(.zip)とがありますが,ここではzip圧縮版を使ってみましょう.本稿では64bit版Windows,Visual Studio 2017 (これはvc14に相当)を使いますので"embree-3.6.1.x64.vc14.windows.zip"をダウンロードして,C:\embreeに保存し,そのフォルダで解凍して下さい.なお,タイミングによってバージョンは変わりますので,ファイル名は適宜読み替えてください.
ソースコードのダウンロード
次に同じくDownloadページからソースコードをダウンロードします.zip圧縮版(*.zip)とtar.gz圧縮版(*.tar.gz)とがありますが,zip圧縮版を使ってみましょう."embree-3.6.1.zip"をダウンロードして,C:\embreeに保存し,そのフォルダで解凍して下さい.こちらも,タイミングによってバージョンは変わりますので,ファイル名は適宜読み替えてください.
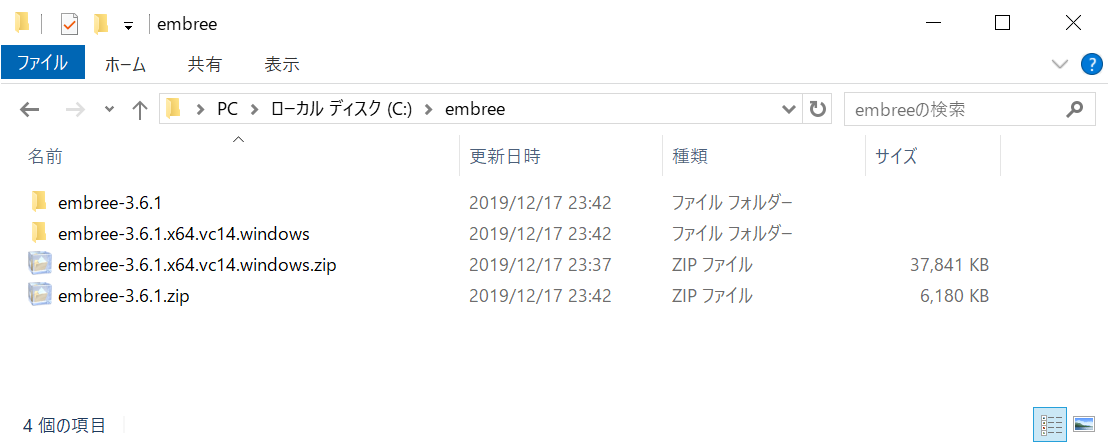
ここまで終わると,C:\embreeフォルダの中は下図のようになっているはずです.
Embreeを使ってプログラミングしてみる
デバイスを作る
いよいよVisual Studio2017を使ってプログラムを作っていきます.Visual Studio2017を起動し,プロジェクトを新規作成する際に[Visual C++] - [Windows デスクトップ]から「Windwos デスクトップウィザード」を選び,「空のプロジェクト」を作成してください.次に,[ビルド] - [構成マネージャ]からアクティブプラットフォームを「x64」に指定して下さい.
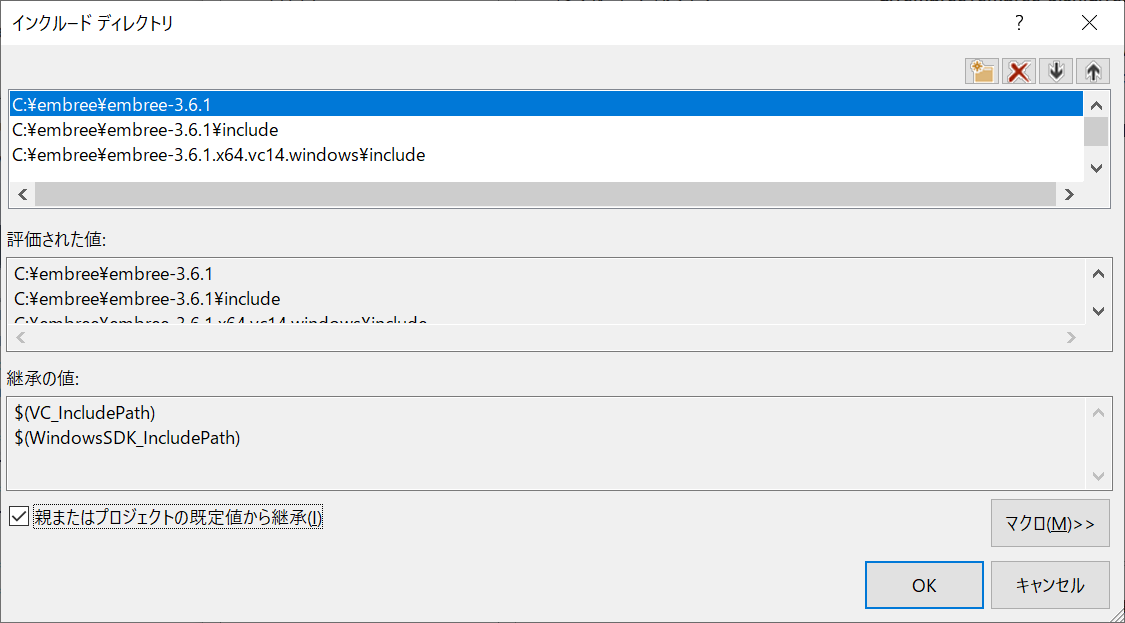
さらに,[プロジェクト] - [プロパティ]からプロパティページを開き,[構成プロパティ] - [VC++ ディレクトリ]からインクルードディレクトリに
- C:\embree\embree-3.6.1
- C:\embree\embree-3.6.1\include
- C:\embree\embree-3.6.1.x64.vc14.windows\include
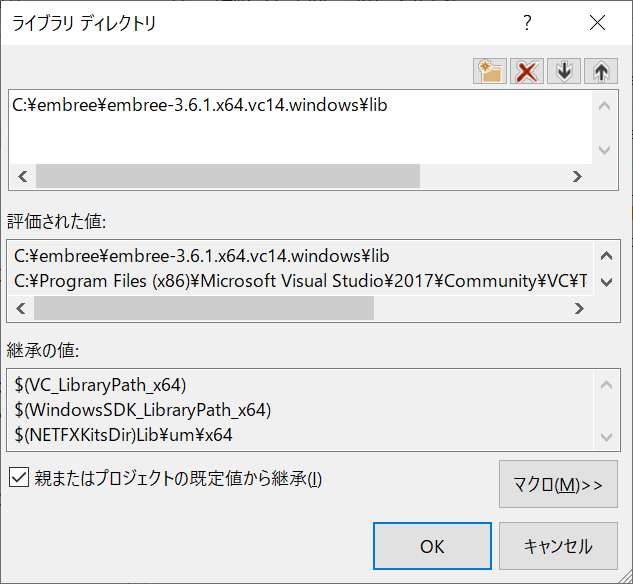
また,ライブラリディレクトリには
- C:\embree\embree-3.6.1.x64.windows\lib
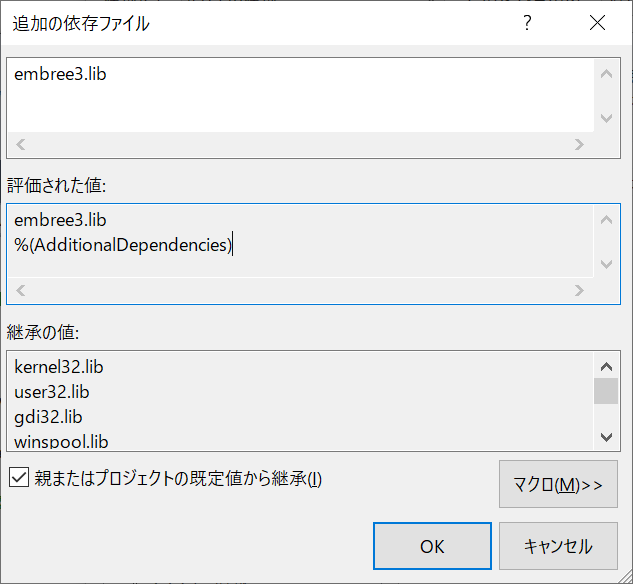
さらに,[リンカ-] - [入力] - [追加の依存ファイル]に
- embree3.lib
また,C:\embree\embree-3.6.1.x64.windows\binに入っている
- embree.dll
- tbb.dll
次に,下に示すソースコードをhello-embree.cppと名前を付けてプロジェクトに追加して下さい.
#include <iostream>
#include <embree3/rtcore.h>
#include <embree3/rtcore_ray.h>
int main(void)
{
/* デバイスを作成 */
RTCDevice device = rtcNewDevice(NULL);
/* シーンを作成 */
RTCScene scene = rtcNewScene(device);
/* ここでこの後いろいろな処理を行う */
/* .... */
/* シーンを削除 */
rtcReleaseScene(scene);
/* デバイスを削除 */
rtcReleaseDevice(device);
return 0;
}無事にコンパイルできたら,実行してみましょう.今回は単なる初期化と終了処理しかしていないため,特に何も出力されません.エラー無く実行できればそれでOKです.
RTCDevice rtcNewDevice(const char* config)
void rtcReleaseDevice(RTCDevice device)
RTCScene rtcNewScene(RTCDevice device)
void rtcReleaseScene(RTCScene scene)三角形をつくる
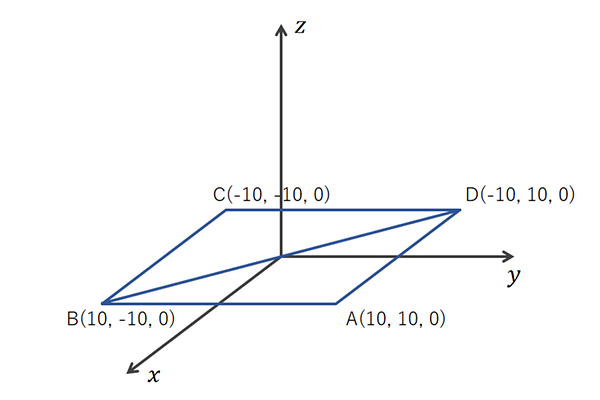 シーン中に,上図のような四角形ABCDがあったとします.Embreeでは四角形を扱うこともできますが,ここでは三角形ABDとBCDの2個があるものとみなしましょう.このシーンには三角形が2個と頂点が4つありますから,三角形ジオメトリを次のように作成します.
シーン中に,上図のような四角形ABCDがあったとします.Embreeでは四角形を扱うこともできますが,ここでは三角形ABDとBCDの2個があるものとみなしましょう.このシーンには三角形が2個と頂点が4つありますから,三角形ジオメトリを次のように作成します.
int ntri = 2; // シーン中の三角形の数
int nvert = 4; // シーン中の頂点の総数
/* 3角形ジオメトリを作成 */
RTCGeometry geom = rtcNewGeometry(device, RTC_GEOMETRY_TYPE_TRIANGLE);
RTCGeometry rtcNewGeometry(RTCDevice device, enum RTCGeometryType type);/* 頂点座標をセット */
float* vertices = (float*)rtcSetNewGeometryBuffer(geom, RTC_BUFFER_TYPE_VERTEX, 0, RTC_FORMAT_FLOAT3, 3 * sizeof(float), nvert);
vertices[0] = 10.f; vertices[1] = 10.f; vertices[2] = 0.f; // 点Aの座標
vertices[3] = 10.f; vertices[4] = -10.f; vertices[5] = 0.f; // 点Bの座標
vertices[6] = -10.f; vertices[7] = 10.f; vertices[8] = 0.f; // 点Cの座標
vertices[9] = -10.f; vertices[10] = -10.f; vertices[11] = 0.f; // 点Dの座標
void* rtcSetNewGeometryBuffer(
RTCGeometry geometry,
enum RTCBufferType type,
unsigned int slot,
enum RTCFormat format,
size_t byteStride,
size_t itemCount
);次に,各三角形をなす頂点の接続情報(頂点の番号)を記録するための変数(index buffer:インデックスバッファ)を次のように用意します.
/* 頂点番号をセット */
unsigned* indices = (unsigned*)rtcSetNewGeometryBuffer(geom, RTC_BUFFER_TYPE_INDEX, 0, RTC_FORMAT_UINT3, 3 * sizeof(unsigned), ntri);
indices[0] = 0; indices[1] = 1; indices[2] = 3; // 三角形ABD
indices[3] = 1; indices[4] = 2; indices[5] = 3; // 三角形BCD
最後にこれまでに作成したジオメトリの情報をシーンに登録します.
/* シーンへ登録 */
rtcCommitGeometry(geom);
rtcAttachGeometry(scene, geom);
rtcReleaseGeometry(geom);
rtcCommitScene(scene);
void rtcCommitGeometry(RTCGeometry geometry)
レイとの交差判定
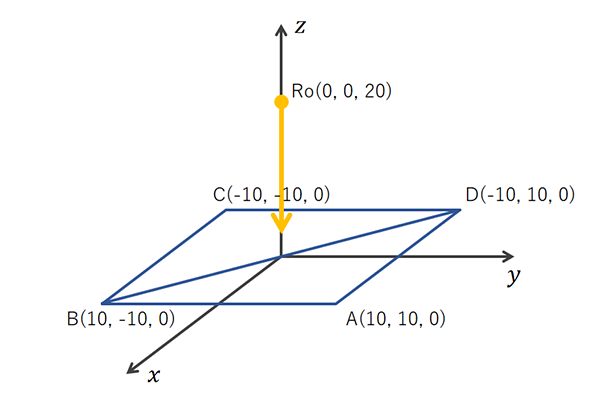 まず例として,上図のような始点Roが(0, 0, 20),方向が(0, 0, -1)のレイが三角形と交差するかどうかを判定しましょう.まずはこのようなレイを次のように作成します.
まず例として,上図のような始点Roが(0, 0, 20),方向が(0, 0, -1)のレイが三角形と交差するかどうかを判定しましょう.まずはこのようなレイを次のように作成します.
/* レイを生成する */
struct RTCRayHit rayhit;
/* レイの始点 */
rayhit.ray.org_x = 0.0; // x
rayhit.ray.org_y = 0.0; // y
rayhit.ray.org_z = 20.0; // z
/* レイの方向 */
rayhit.ray.dir_x = 0.0; // x
rayhit.ray.dir_y = 0.0; // y
rayhit.ray.dir_z = -1.0; // z
/* 交差判定する範囲を指定 */
rayhit.ray.tnear = 0.0f; // 範囲の始点
rayhit.ray.tfar = INFINITY; // 範囲の終点.交差判定後には交差点までの距離が格納される.
いよいよレイと三角形との交差判定をしていきます.
struct RTCIntersectContext context;
rtcInitIntersectContext(&context);
/* 交差判定 */
rtcIntersect1(scene, &context, &rayhit);
if (rayhit.hit.geomID == RTC_INVALID_GEOMETRY_ID)
{
/* 交差点が見つからなかった場合 */
std::cout << "Reject." << std::endl;
}
else
{
/* 交差点が見つかった場合 */
std::cout << "Intersect" << std::endl;
}
void rtcIntersect1(
RTCScene scene,
struct RTCIntersectContext* context,
struct RTCRayHit* rayhit
)
#include <iostream>
#include <embree3/rtcore.h>
#include <embree3/rtcore_ray.h>
int main(void)
{
/* デバイスを作成 */
RTCDevice device = rtcNewDevice(NULL);
/* シーンを作成 */
RTCScene scene = rtcNewScene(device);
int ntri = 2; // シーン中の三角形の数
int nvert = 4; // シーン中の頂点の総数
/* 3角形ジオメトリを作成 */
RTCGeometry geom = rtcNewGeometry(device, RTC_GEOMETRY_TYPE_TRIANGLE);
/* 頂点座標をセット */
float* vertices = (float*)rtcSetNewGeometryBuffer(geom, RTC_BUFFER_TYPE_VERTEX, 0, RTC_FORMAT_FLOAT3, 3 * sizeof(float), nvert);
vertices[0] = 10.f; vertices[1] = 10.f; vertices[2] = 0.f; // 点Aの座標
vertices[3] = 10.f; vertices[4] = -10.f; vertices[5] = 0.f; // 点Bの座標
vertices[6] = -10.f; vertices[7] = -10.f; vertices[8] = 0.f; // 点Cの座標
vertices[9] = -10.f; vertices[10] = 10.f; vertices[11] = 0.f; // 点Dの座標
/* 頂点番号をセット */
unsigned* indices = (unsigned*)rtcSetNewGeometryBuffer(geom, RTC_BUFFER_TYPE_INDEX, 0, RTC_FORMAT_UINT3, 3 * sizeof(unsigned), ntri);
indices[0] = 0; indices[1] = 1; indices[2] = 3; // 三角形ABD
indices[3] = 1; indices[4] = 2; indices[5] = 3; // 三角形BCD
/* シーンへ登録 */
rtcCommitGeometry(geom);
rtcAttachGeometry(scene, geom);
rtcReleaseGeometry(geom);
rtcCommitScene(scene);
/* レイを生成する */
struct RTCRayHit rayhit;
/* レイの始点 */
rayhit.ray.org_x = 0.0; // x
rayhit.ray.org_y = 0.0; // y
rayhit.ray.org_z = 20.0; // z
/* レイの方向 */
rayhit.ray.dir_x = 0.0; // x
rayhit.ray.dir_y = 0.0; // y
rayhit.ray.dir_z = -1.0; // z
/* 交差判定する範囲を指定 */
rayhit.ray.tnear = 0.0f; // 範囲の始点
rayhit.ray.tfar = INFINITY; // 範囲の終点.交差判定後には交差点までの距離が格納される.
/* 交差判定 */
struct RTCIntersectContext context;
rtcInitIntersectContext(&context);
/* 交差判定 */
rtcIntersect1(scene, &context, &rayhit);
if (rayhit.hit.geomID == RTC_INVALID_GEOMETRY_ID)
{
/* 交差点が見つからなかった場合 */
std::cout << "Reject." << std::endl;
}
else
{
/* 交差点が見つかった場合 */
std::cout << "Intersect" << std::endl;
}
/* シーンを削除 */
rtcReleaseScene(scene);
/* デバイスを削除 */
rtcReleaseDevice(device);
return 0;
}
練習問題
- 衝突位置までの距離はRTCRayHit構造体のray.tfarに格納されています.交差点の3次元位置座標を求めてコンソールに表示して下さい.図から,このシーンでは原点(0,0,0)で交差するものと予想されます.
- 衝突した点の正規化済み法線ベクトルをコンソールに表示して下さい.図から,このシーンでの交差点における法線は(0, 0, 1)であると予想されます.